자율주행자동차는 운전자 없이 위성항법시스템이나 각종 센서 등을 이용해 장애물을 피하면서 목적지까지 도로를 달리는 자동차를 말하는데, 자동차관리법 제2조에 따르면 [자율주행자동차]란 운전자 또는 승객의 조작 없이 자동차 스스로 운행이 가능한 자동차라고 규정하고 있다. 미국 도로교통안전국과 국제자동차기술자협회에서는 자율주행차 개발 기술력에 대해 레벨 0~5의 6단계로 구분하고 4~5레벨 단계를 완전 자율주행차로 인정하고 있다.

자율주행 프로세스-자율주행 자동차는 끊임없이 인지-판단-제어를 반복하면서 소프트웨어가 명령을 내리면 자동차는 그 명령에 따라 주행하게 된다.
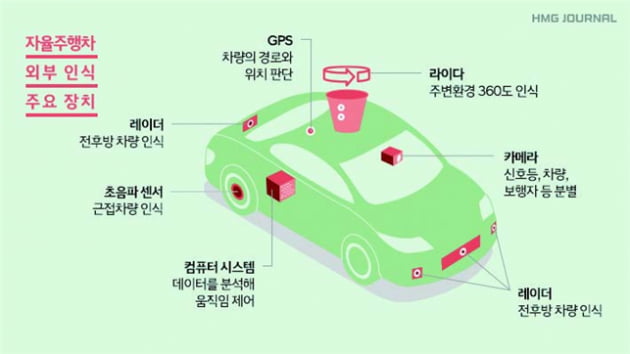
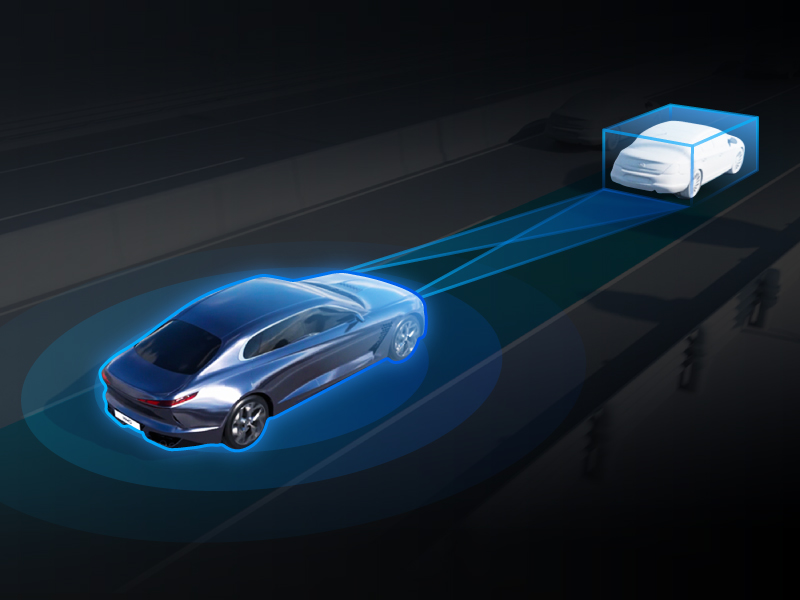
(1) 인지-자율주행차는 도로 주변 상황과 정보를 신속하고 정확하게 파악할 수 있어야 적절한 판단과 제어가 가능하다.즉 GPS와 같은 디지털 지도정보를 활용하여 차선, 횡단보도 등의 고정물과 경로를 탐색하거나 V2X(Vehicle to Vehicle: 차량간 통신)를 활용한 차량이나 보행자, 신호등, 사고차량 등에 대한 정보를 인식하여 수집한다. 기술 – 리모트 ADAS : 차량 주변을 감지할 수 있는 특수장비로 차선이탈이나 전방차량 추돌 또는 보행자 충돌의 위험 등을 운전자에게 경고하는 기술 – 복합GPS : 듀얼GPS, 통신기지국, 와이파이 활용에 의한 조정 및 위치 측정 – 후방 ‘서라운드 카메라-레이터, 라이너
인기글





(2) 판단 – 인지된 정보를 가지고 주행전략을 결정하는 단계로 자동차가 어떤 환경에 있는지 분석한 후 가장 적합한 주행전략을 결정한다. 기술 – 3D HD맵 솔루션 : 지형지물을 정밀하게 판단해 악천후나 야간에도 주행을 지원한다.- 인공지능 컴퓨터: 주행경로를 실시간으로 분석해 제어장치에 전달한다.
(3) 제어-기관 가감속이나 조향 등 차량 제어를 통해 목적지로 이동한다.





